• **the question**: to tile the radiance axis you need to *change the exposure factor* $k_i$ between shots. Four knobs do it — **shutter speed, aperture, ISO, neutral-density (ND) filter** — and they are **not** interchangeable: each has a side effect on the image beyond brightness. [`fig-vary-exposure-knobs`]
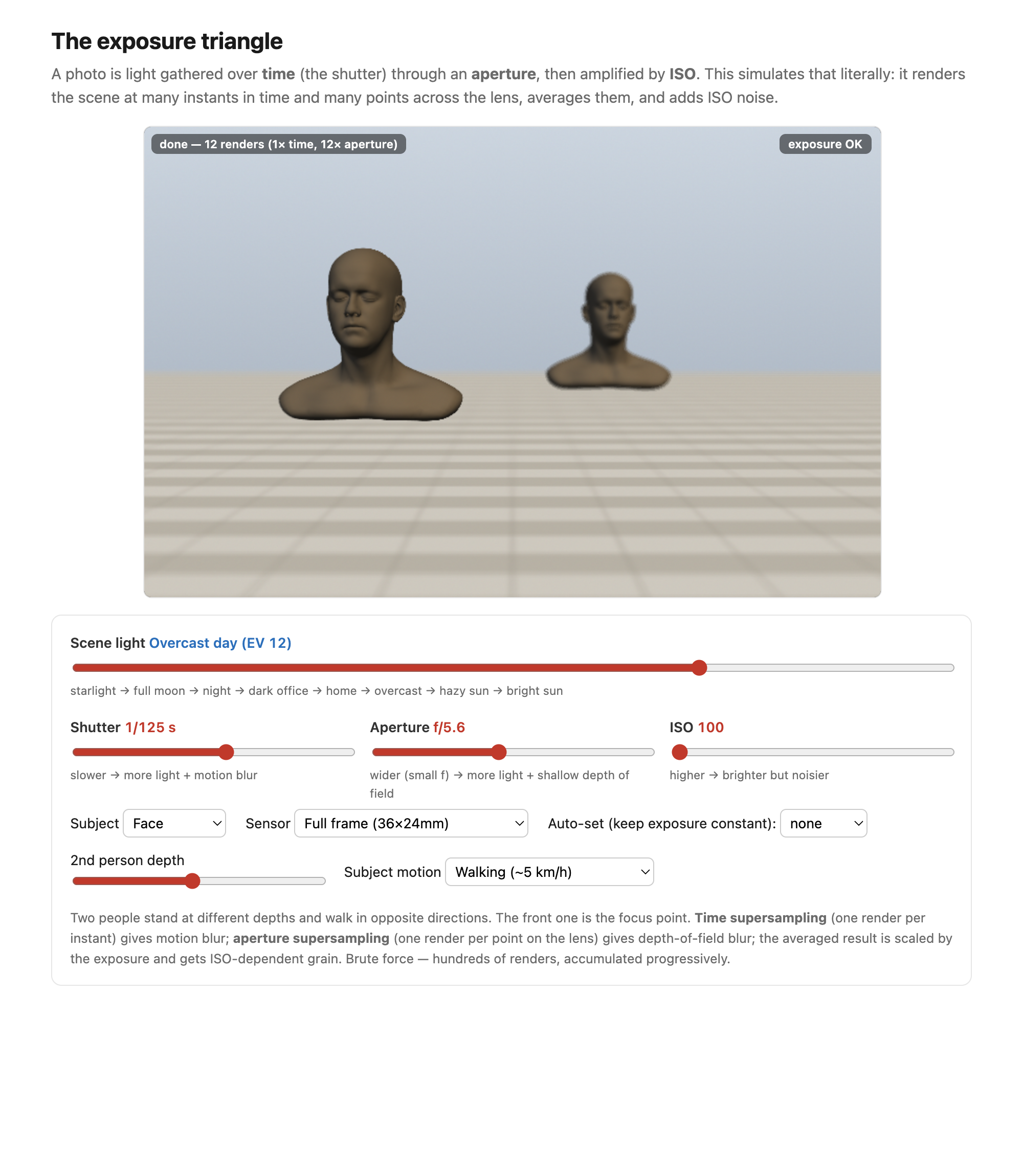
• **shutter speed — the clean knob (use this)**: range $\sim$30 s to 1/4000 s ≈ **6 orders of magnitude**. **Pros: reliable and linear** — doubling exposure time doubles collected photons, so $k_i\propto t_i$ exactly, which is what the merge math assumes. **Con:** very long exposures add their own noise (dark current) and risk motion. This is the default for bracketing because it changes *only* the exposure, nothing else about the image.
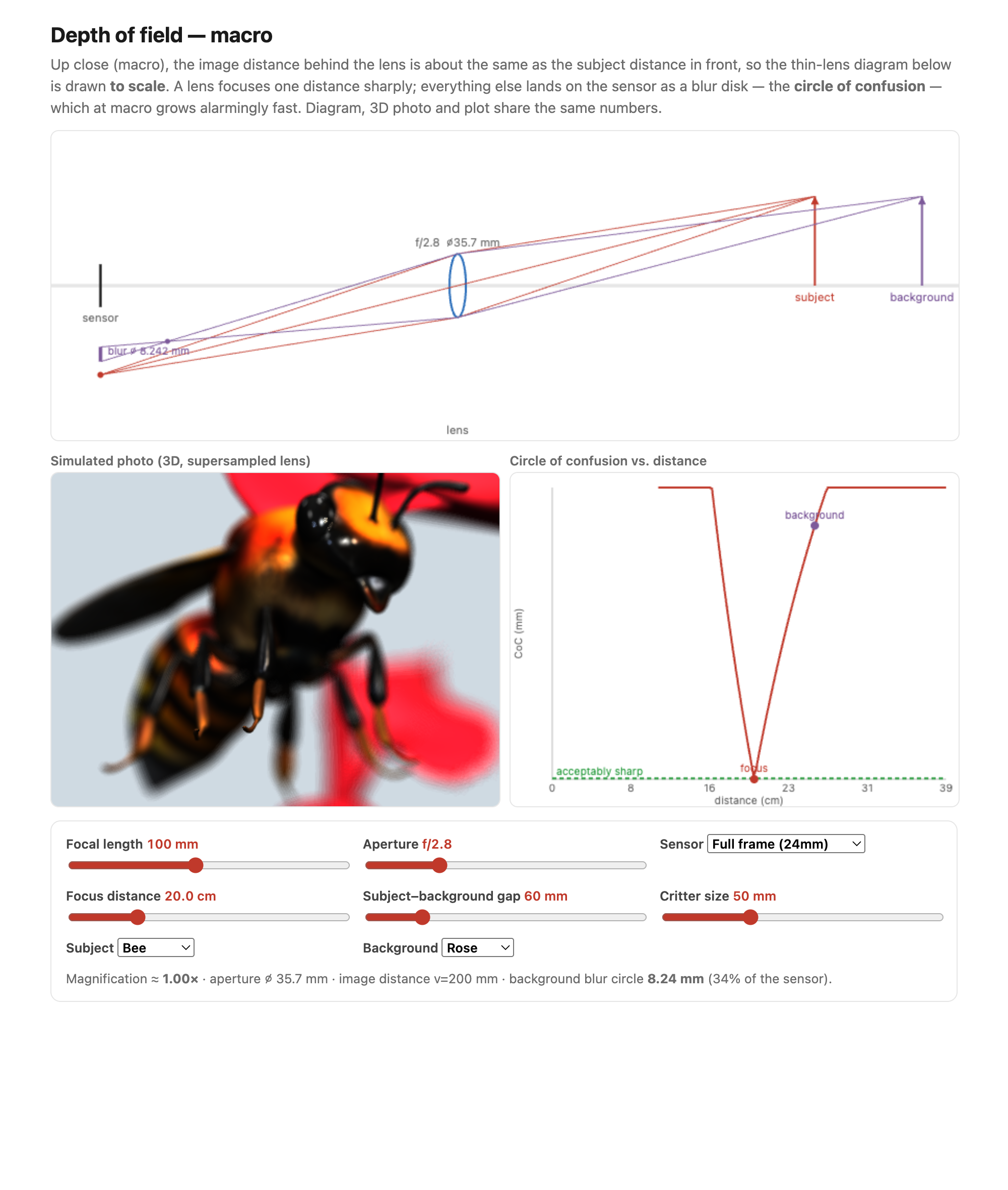
• **aperture — changes the picture**: range $\sim f/1.4$ to $f/22 \approx$ **2.5 orders** ($k\propto 1/N_f^2$). **Con:** it changes **depth of field** — the bracket frames would have *different focus blur*, breaking the "only the exposure changes" assumption. Use only when desperate.
• **ISO — amplifies, doesn't collect**: range $\sim$100 to 1600 ≈ **1.5 orders**. ISO is **analog/digital gain applied after capture**, not more light — so it scales signal *and* read-noise-referred terms and generally **raises noise**. Useful when desperate, but a poor way to extend range on its own. (Hasinoff's insight, below, is that ISO *is* a useful degree of freedom once you model noise properly.)
• **neutral-density (ND) filter — darkens the world**: up to $\sim$4 densities ≈ 4 orders, **stackable**. **Cons:** not perfectly neutral (introduces a **color shift**), imprecise, and you must **touch the camera** to add it (risking shake → needs re-registration). **Pro:** works with strobe/flash where shutter can't, a good complement when desperate.
• **the takeaway** (ties to **L7** — stops): exposure is **counted in stops** (factors of 2, additive in log space), and the clean way to walk the radiance axis is **shutter**; the other knobs trade a side effect (DoF, noise, color) for range and are fallbacks. *Forward-ref:* which exposures to pick — not just *how* to vary, but the **optimal set** — is the *Optimizing the capture and merge* section (Hasinoff).
• **the merge assumes static + registered**: the basic merge assumes **only the exposure changes — no motion**. Hand-held bracketing breaks this; align first (Ward 2003's **median-threshold bitmap**, MTB — a contrast-robust alignment that compares images thresholded at their median, accelerated on a pyramid) and reject **ghosts** from moving objects. Cross-ref [[#Image alignment]]; the burst-imaging chapter makes robust alignment central.
• **on-chip HDR — the sensor does the merge (no software bracket)**: everything above assumes *software* fuses a bracket of separate frames. But **on-chip HDR is now an industry-wide sensor capability** — many modern image sensors **produce a high-dynamic-range signal directly, on-chip**, folding the "capture several slices and combine" step into the readout itself. **Sony** is a prominent example (its DOL / dual-read schemes, below), but **OmniVision**, **Samsung (ISOCELL)**, and **onsemi** and other automotive vendors (split-pixel designs) all do on-chip HDR by various strategies — it's a hardware strategy, not one vendor's feature. This is the hardware cousin of bracketing: instead of $N$ frames merged in post, the slices are captured and combined *inside the sensor / ISP*, so the photographer gets one wide-DR raw out. The main strategies differ in **how** they multiplex the dynamic range — in **time**, in **space**, or in **gain**: [`fig-hdr-sensor-strategies`]
• **DOL-HDR / "double read" (digital overlap)** — read the same exposure twice, or interleave **long + short** exposures line-by-line, then combine; the long read recovers shadows, the short read the highlights. This is the Sony **"double read."** *Time-multiplexed:* the long and short captures are not simultaneous, so anything moving between them **ghosts** (motion artifacts) — the same de-ghosting problem as a hand-held bracket, now inside one frame.
• **dual-conversion-gain (DCG)** — each pixel can be read at **two readout (conversion) gains**: high gain for a low noise floor in the shadows, low gain for more full-well headroom in the highlights; the two reads are merged. *Gain-multiplexed:* both reads see the **same instant**, so it is the **cleanest** option — no motion artifacts, no resolution loss — but the extra range it buys is **bounded** by the gain spread.
• **split-pixel / dual-photodiode** — each photosite carries a **large + small** sub-photodiode: the large one saturates early (shadows/midtones), the small one keeps reading into bright highlights. Common in **automotive** sensors (sun-glare, tunnel exits). *Space-multiplexed:* costs **resolution / fill-factor and SNR** (the small diode is noisy), but both sub-pixels are exposed simultaneously, so no motion ghosting.
• **lateral-overflow / LOFIC / voltage-domain tricks** — add **extra charge capacity** per pixel (a lateral-overflow integration capacitor that catches the charge spilling past the photodiode's well), extending full-well in the **voltage/charge domain** without a second exposure.
• **spatially-varying exposure (SVE / "assorted pixels")** — bake **different sensitivities into neighbouring pixels** (an exposure mosaic, like a Bayer pattern but for ND), then demosaic into an HDR image — **Nayar & Mitsunaga**. *Space-multiplexed:* trades **resolution** for range, single-shot so no motion artifacts.
• **logarithmic / companding sensors** — a pixel whose response is **log (or piecewise-companded)** in radiance, capturing many decades in one read at the cost of **lower contrast resolution / fixed-pattern non-uniformity** in any given band.
• **the trade-off, in one line**: **time-multiplexed** schemes (DOL double-read) buy range with **motion artifacts**; **space-multiplexed** schemes (split-pixel, SVE/assorted pixels) buy it with **resolution / SNR**; **gain-domain** (DCG) is the **cleanest** — same instant, full resolution — but its extra range is **bounded**. The software **HDR+ burst** of the next chapter ([[#Application to cell phones: HDR+ and burst imaging]]) sits at the opposite end: maximal flexibility and denoising-for-free, paid for in compute and alignment. This is the **computational-sensor** trade space — push the work into silicon or into software — developed in [[Advanced computational photography]] (cross-ref). [`fig-hdr-sensor-strategies`]